
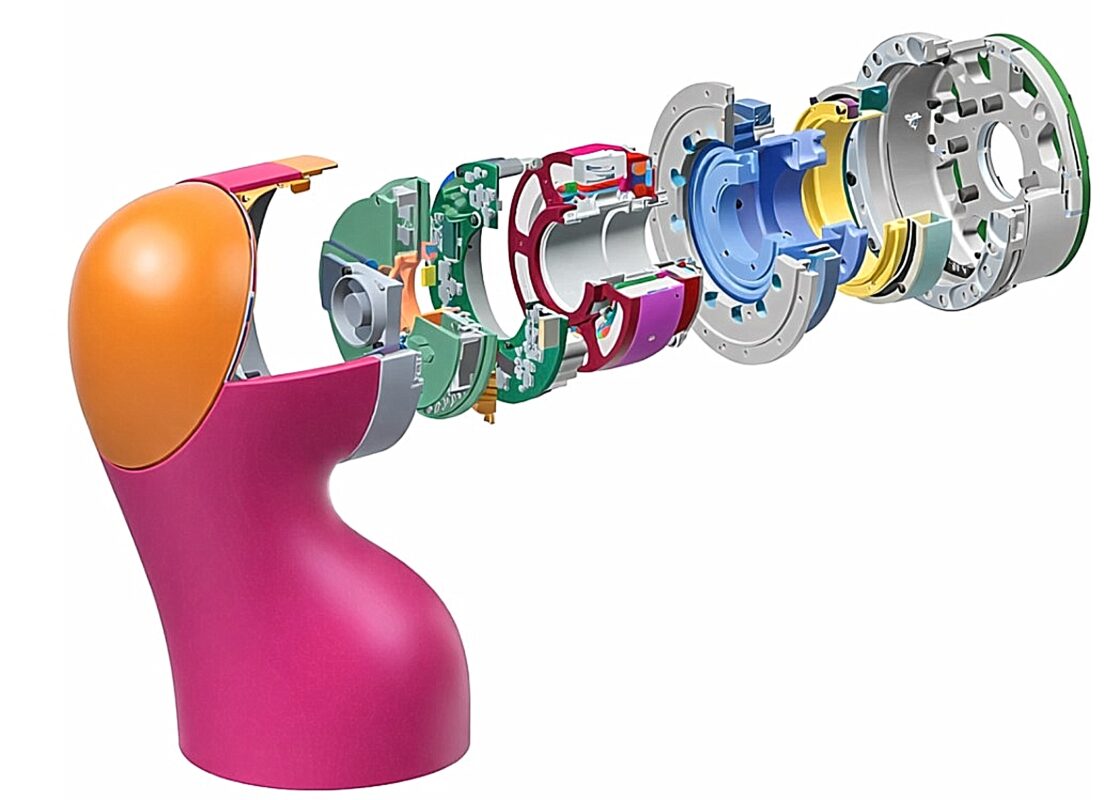

Οι διαφορετικοί τύποι ρομπότ βασίζονται σε εξειδικευμένους κινητήρες για την επίτευξη κίνησης ακριβείας. Στα βιομηχανικά ρομπότ έξι αξόνων, οι μόνιμοι μαγνήτες και οι σερβοκινητήρες χωρίς ψύκτρες κυριαρχούν την τελευταία δεκαετία, ενώ όλο και συχνότερα χρησιμοποιούνται εκδόσεις χωρίς πλαίσιο – frameless – και συστήματα άμεσης μετάδοσης κίνησης – direct-drive.
Ένας υψηλός αριθμός πόλων στον κινητήρα, σε συνδυασμό με συστήματα μετάδοσης strain-wave, προσφέρει υψηλή ροπή και χαμηλή διακύμανση ταχύτητας. Αυτά τα συστήματα συμπληρώνονται συνήθως από απόλυτους κωδικοποιητές – encoders – για έλεγχο θέσης κλειστού βρόχου και φρένα ασφαλείας για τη συγκράτηση του φορτίου σε περίπτωση διακοπής ρεύματος.
Διαφοροποίηση ανάλογα με την άρθρωση
Χρησιμοποιώντας την αναλογία ώμου-αγκώνα-καρπού, ο έλεγχος και η γεωμετρία των κινητήρων προσαρμόζονται στις ανάγκες κάθε άρθρωσης. Στον ώμο και τον αγκώνα, η προτεραιότητα δίνεται στην ακαμψία και την πυκνότητα ροπής για τον χειρισμό μεγάλων φορτίων. Αντίθετα, οι κινητήρες στους καρπούς πρέπει να είναι ελαφριοί, με χαμηλή αδράνεια και χωρίς κραδασμούς. Σε αυτές τις περιπτώσεις προτιμώνται οι κινητήρες αξονικής ροής ή τύπου pancake, καθώς είναι μικρότεροι και ελαφρύτεροι.
Τα ρομπότ τύπου SCARA, που χρησιμοποιούνται για οριζόντια συναρμολόγηση, ενσωματώνουν επίσης σερβοκινητήρες AC υψηλής ροπής για γρήγορες επιταχύνσεις, ενώ ο κατακόρυφος άξονας Z μπορεί να διαθέτει κινητήρες με κοχλίες ή γραμμικούς κινητήρες.
Η σύγκλιση βιομηχανικών και συνεργατικών ρομπότ
Τα τελευταία χρόνια παρατηρείται μια σύγκλιση μεταξύ των κλασικών βιομηχανικών ρομπότ και των συνεργατικών ρομπότ – cobots. Και οι δύο τύποι χρησιμοποιούν πλέον ευρέως κινητήρες χωρίς πλαίσιο και ενσωματώνουν τεχνητή νοημοσύνη – AI – για εξειδικευμένες λειτουργίες όπως η συγκόλληση, η λείανση και η επιθεώρηση.
Η επιλογή του κινητήρα και του συστήματος μετάδοσης επηρεάζει άμεσα το ωφέλιμο φορτίο. Στον υπολογισμό της μάζας περιλαμβάνονται οι συνδέσμοι του ρομπότ, το εργαλείο στο άκρο του βραχίονα και τα ίδια τα αντικείμενα εργασίας.
Συστήματα μετάδοσης και γρανάζια
Οι ρομποτικές αρθρώσεις χρησιμοποιούν συχνά κυκλοειδή συστήματα μετάδοσης, καθώς και πλανητικά γρανάζια ή συστήματα strain-wave. Μια νέα εξέλιξη είναι η τεχνολογία μαγνητικής μετάδοσης, η οποία χρησιμοποιεί διαμορφωμένα μαγνητικά πεδία για την άσκηση δύναμης χωρίς επαφή, παρατείνοντας σημαντικά τη διάρκεια ζωής των εξαρτημάτων.
Τα κυκλοειδή συστήματα μετάδοσης – cycloidal gearing – προτιμώνται για την ανθεκτικότητά τους σε φορτία κρούσης και καταστάσεις έκτακτης ανάγκης, ενώ τα πλανητικά γρανάζια προσφέρουν σχέσεις μετάδοσης από 50:1 έως 200:1, ενισχύοντας τη ροπή επιτάχυνσης.
Μικρορομποτική και Καρτεσιανά ρομπότ
Στην κατηγορία των μικροσκοπικών ρομποτικών βραχιόνων, όπως η σειρά S0 της Chieftek Precision, χρησιμοποιούνται εξατομικευμένοι κινητήρες χωρίς πλαίσιο με συστήματα διπλής ανάδρασης, τα οποία περιλαμβάνουν οπτικούς και μαγνητικούς κωδικοποιητές για απόλυτη επαναληψιμότητα.
Τέλος, τα Καρτεσιανά ρομπότ – X-Y-Z – παραμένουν η προτιμώμενη λύση για μεγάλους χώρους εργασίας. Παρόλο που η εγκατάστασή τους είναι πιο σύνθετη λόγω της δρομολόγησης καλωδίων και σωλήνων, προσφέρουν υψηλή αποδοτικότητα σε παραγωγή μεγάλης κλίμακας. Τα συστήματα αυτά χρησιμοποιούν συνδυασμούς σερβοκινητήρων ή βηματικών κινητήρων – stepper motors – με ιμάντες ή κοχλίες, προσφέροντας εξαιρετική ακαμψία και ακρίβεια θέσης.





